|
Modern visual navigation approaches mostly use homogeneous features (e.g. salient
points) as landmarks. However, this choice cannot fully exploit
the information possessed in the heterogeneous landmarks from
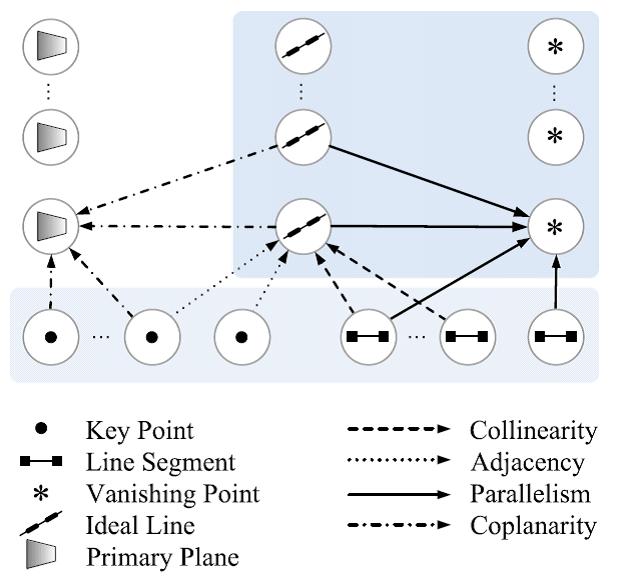
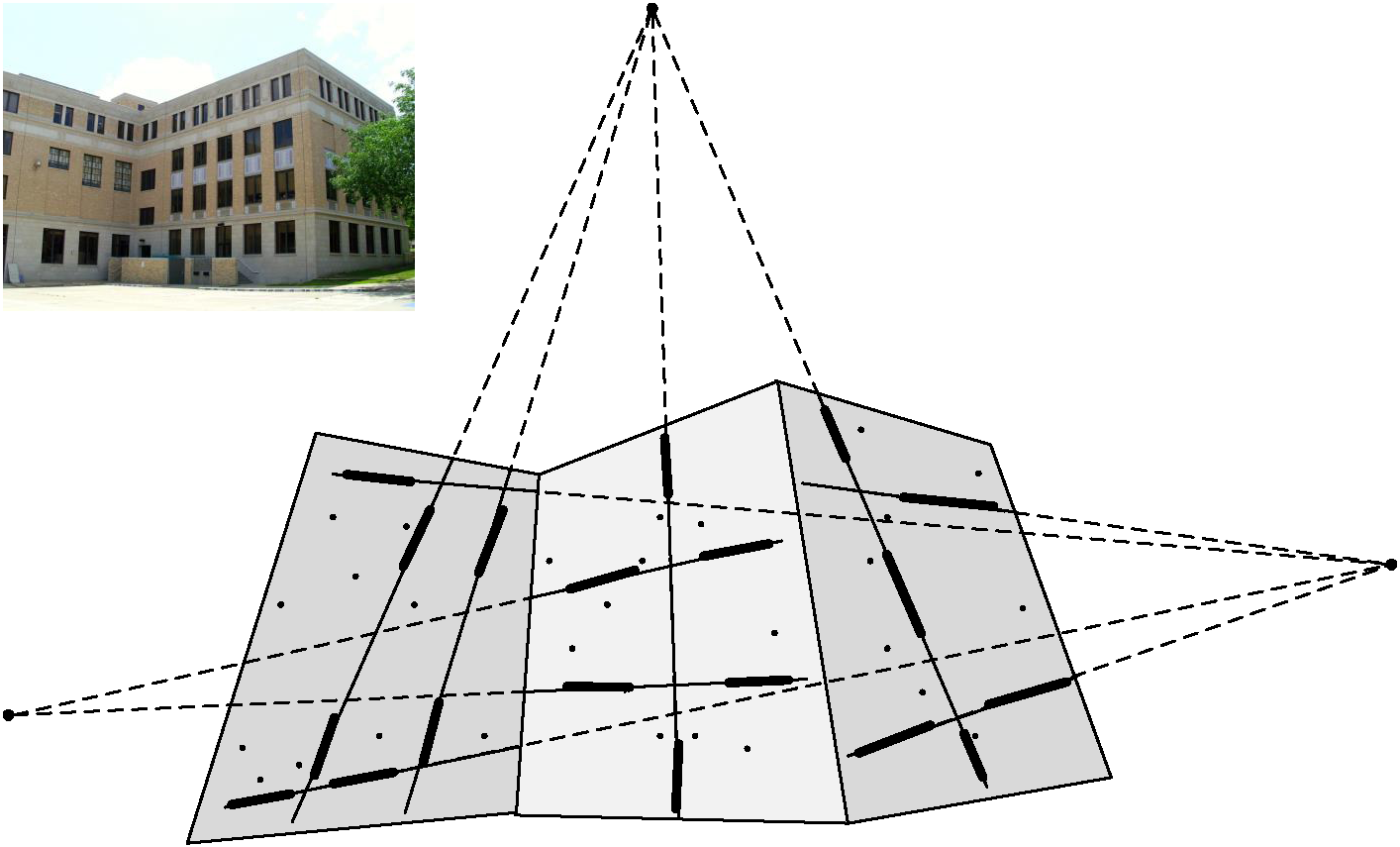
man-made environments. As illustrated in the figure, there exist abundant lines in parallel directions and
salient building facades in typical urban environments. These heterogeneous landmarks can help
improve navigation performance if the geometric constraints
between them are modeled and utilized properly.
This is also the source code release for the following paper:
Yan Lu and Dezhen Song, "Visual Navigation Using Heterogeneous Landmarks and Unsupervised Geometric Constraints", IEEE Transactions on Robotics (T-RO), vol. 31, no. 3, June 2015, pp. 736 – 749. [Download from IEEE]
|
|